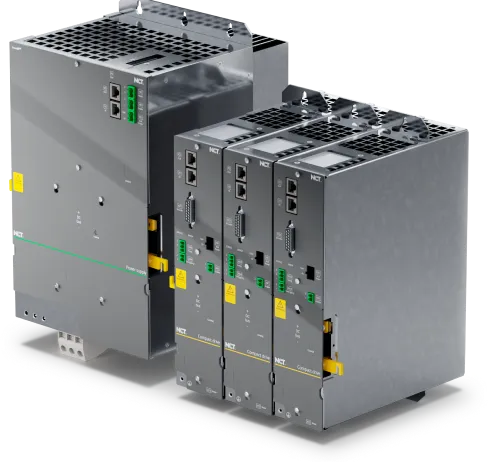





NCT CNC Vezérlők
15" és 19" kijelző méretben
Az NCT CNC vezérlők lehetővé teszik a precíziós és hatékony munkavégzést a CNC gépekben..
Ismerje meg vezérlőinket!






Horizontális tengelyű megmunkáló gépek
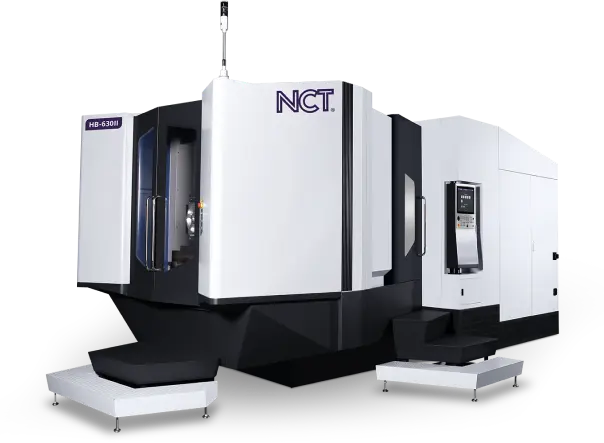
HB-500, -630, -800
Nagytömegű öntvény ágy, állvány és szánrendszer
Orsóházi hajtóműves, vagy direkt hajtású kivitel
Orsóházi hajtóműves, vagy direkt hajtású kivitel